出遅れ感はあるのですが、すでに完結したスターウォーズに出てきた人気キャラクタのR2-D2を作ってみたくなりました。大きいとは思うのですが実寸大で作ります。
2023年4月26日
R2-D2検討
情報収集
検索したところ、同好会があったので登録しました。会の名前はR2-D2ビルダーズクラブです。日本支部もあるようです。ここには、会のメンバーが拾い出した寸法の図面もあります。この図面をダウンロードして利用しました。
ほかには、動画サイトでR2-D2を作った的なものを見て参考にしています。
3Dプリンターで外装をすべて作るという動画もありました。そこではギアやタイヤも3Dプリントしていましたので、自分も作れそうだと思ったのでした。
仕様の検討
外装:3Dプリンタで印刷。データは自分で作る。元データは上記のサイトです。
素材は、丈夫そうなカーボン強化PLAを使ってみます。
走行系:モーターは電動バイク用の24V・100Wモーターを左右で二個使いましょう。
タイヤはTPUとPLAで自作します。
電源:リン酸鉄系バッテリーを使ったポータブル電源を使ってみます。
容量は300WHです。
電装系、センサー、コントローラ:未定
ドームの製作
特徴的なドームの外装から作ります。
すべて3Dプリントする予定なので、寸法の制約は「プリントできる」になります。
一発印刷は無理なので、分割して貼り合わせます。
接着剤は、アクリル用のジメチルエタンを主成分にしたものです。
小分け用に中栓付きのガラス瓶と針付きの注射器を100均で調達しましたが、注射器は長持ちしません。
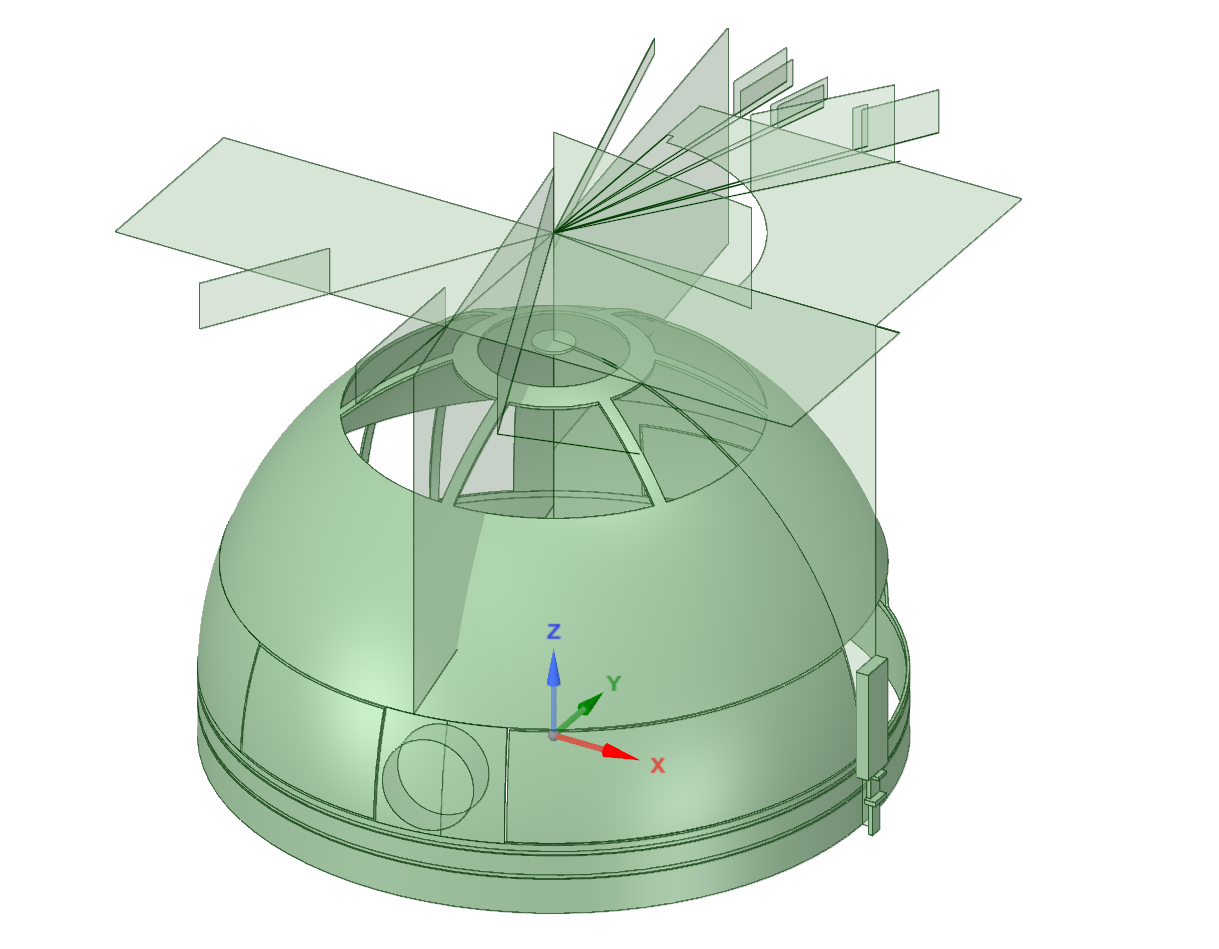
ドームの形をつくります
平面で6分割の線を引いてドームを分割し、天頂の穴をあけます。
下のほうにある窓は、細かく分割していきます。
数がおおいのでひたすら頑張って分割します。
縦割り、横割りで分割して窓を開けていきます。
窓開けが一通り終わりました。
天頂部分はさらに分割しておきます。
下のほうを6分割して貼り合わせ部分に糊代をつけておきます。
次はプリントです。
プリンタはKingroonのKSP3S PROで20㎝x20㎝x20㎝のプリントができます。
ひとつづつプリントしますが、時間が13時間越えです。
これが6個いるので気長に行きましょう。
天頂部はこれを3個作って貼り合わせます。
だんだんとできてきましたので、順次貼り合わせます。
形状は完成しました!!!
積層痕と張り合わせ部の段差をパテと削りで滑らかにします。
内側はこんなかんじ。
外側をサンドペーパーがけして概ねなめらかにして
黒色のサーフェイサーで下地塗装をしました。
5月連休の青空のしたで塗装しています。
積層痕のへこみが消えないのでこれで4回目です。
かなりきれいになってきました。
塗パテを使ったほうがよかったかもしれないですが、アマゾンで買ったサーフェイサーが最低数量しばりがあって3缶買ったのでたっぷり吹いておきます。
ドーム黒サフ塗装屋外で乾燥中の図
正直言って塗装は経験不足なので 次の銀色塗装がどうなるか楽しみです。
塗ったよー。
塗料は「アサヒペン メッキ調スプレー 300ML シルバー」です。
塗った直後は鏡面っぽいですが、乾くとこんな感じになります。
乾燥しても金属粉がとれるらしい。対策は後程。
よく見ますと下地処理が甘いなあ。凸凹がよくわかります。
削らなかったところは しっかりと積層痕が残っています。(^^;;;
(2)に続く



















.png)
.png)
.png)
.png)
.png)



.png)
.png)















